Mission statement
PACE project evolved from a web-based satellite engineering course at National Cheng Kung University in Tainan, Taiwan. Educational focus was on hands-on spacecraft design. The project is part of the research activities of PACELAB students, next to other satellite design projects.
The mission of PACE is to establish a nanosatellite platform in low earth orbit for the purpose of in-orbit evaluation of attitude determination and control algorithms, and to collect measurement data of the orbit environment.
Scientific and technical objectives
- In-orbit verification of momentum wheel, and digital sun sensors
- Attitude determination and control experiments
- Verification of spacecraft platform
- Comparison of simulation models with in-flight measurement data

Main mission parameters
- Mission duration
- 6 months
- Orbit type
- Low earth orbit, sun-synchronous
- Altitude
- 650 km
- Inclination
- 98deg
- Satellite type
- Nanosatellite (double unit CubeSat)
- Total satellite mass
- <= 2 kg
- Ground station
- NCKU ground station, Tainan, Taiwan
- Launch rocket
- DNEPR (Russian ICBM)
Spacecraft bus components
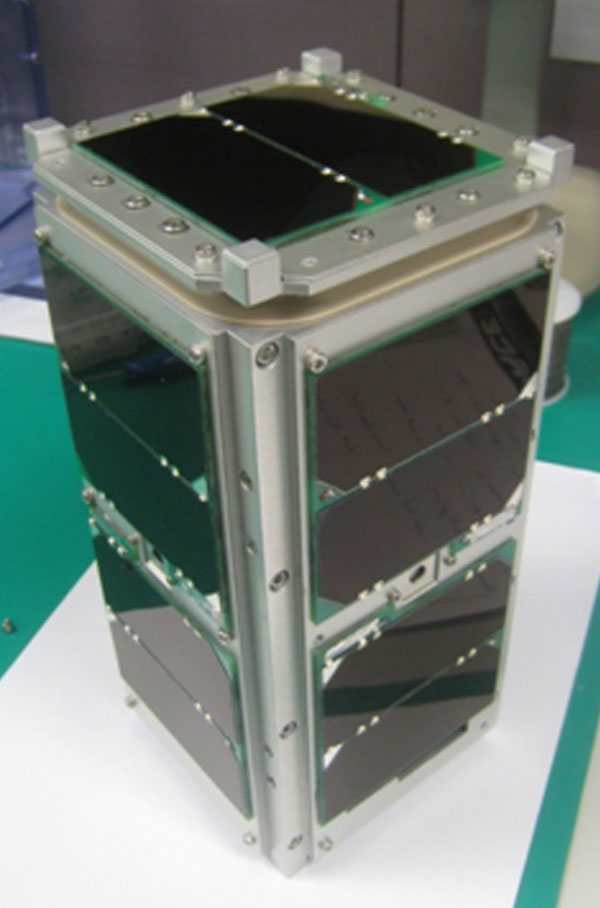
The PACE nanosatellite is a 2U CubeSat standard and uses mostly COTS (Commercial off-the-Shelf) components as well as in-house developed parts, to reduce the costs of the spacecraft. The dimensions of the satellite are 100 mm x 100 mm x 243 mm with a mass of < 2 kg.
The satellite structure is entirely made from machined Al-6061, a lightweight structure offering a rigid housing for all subsystems. The main structure is completely demountable to facilitate a comfortable spacecraft assembly. A secondary structure is integrated to mount the attitude actuators. The hard-anodized corner bars are the gliding guidance for the ejection from the storage container. These bars also include the shutdown switch mechanism, which keeps the satellite unpowered during launch. The structure is completed with an antenna ring and an enclosing bottom frame.
EPS (Electric Power Subsystem). Mounted on the side panels are high-efficient GaAs solar panels that are wired to the inside of the satellite. On the power system board, the energy input from the solar cells is converted into a regulated voltage level, which is used for supply of the main power bus and for charging the two Lithium-ion batteries. During an eclipse phase of the orbit, the main power bus, which provides a stable 3.3 V and 5 V to the satellite electronics, is supplied directly from the batteries.
RF communications: Use of a TNC (Terminal Node Controller) device for the packet protocol and the beacon signal. For command uplink and data downlink AX.25 packets are sent with 1200 baud using the UHF frequency. In addition, a Morse code beacon, containing identification and system status information, is sent periodically to facilitate satellite tracking and status monitoring. The system is connected to the dipole antenna that is stowed around the antenna ring while in launch configuration. When in orbit, the deployment mechanism is triggered that unfolds the antennas for communication.
C&DH (Command and Data Handling) subsystem: Use of two processors, a real-time clock, and mass storage memory. Both processors can be software updated during mission operation and can be used as a redundant configuration. For the PACE mission, one processor runs the mission software and satellite health monitoring, whereas the other processor runs the attitude determination and control algorithms. Virtually all software parameters and settings of the satellite components can be changed in orbit, in order to better adapt the satellite to the space environment.
ADCS (Attitude Determination and Control Subsystem). The spacecraft is 3-axis stabilized. The ADCS board contains the attitude sensor and actuator interface assembly (actuator drivers and electronic circuits for sensor interfacing). The external components that are connected to the ADCS board are the four digital sun sensors, the magnetic coils, and the momentum wheel.
| Structure and mechanisms Material Mechanisms |
Al6061, anodized Deployment switch, RBF, antenna deployment |
| Electrical power Solar cells Nominal power output Battery type Battery pack capacity Voltage levels |
20x Triple-Junction GaAs space solar cells 2 W Lithium-Ion 3.6 Ah 3.3 V, 5 V, battery output (nom. 3.7 V) |
| Communications Type Packet modulation Packet protocol Beacon modulation Beacon protocol RF max output power Frequency Bandwidth Antenna type |
Non-coherent, half-duplex, 20K00F1D— FSK 1200+ baud CCSDS + ESA-PUS OOK 15 WPM Morse code 1 W UHF 437.485 MHz (uplink and downlink) 20 kHz Half-wave dipole |
| Command and data handling Processor Memory |
2x 8051 microcontroller, up to 100 MHz max. 16 Mbyte Flash |